MoveIt Pro 6 - Robotics software for the AI era
We’re excited to unveil release 6.0 that further extends MoveIt Pro’s leadership in 3 key areas:
- Rapid development
- Hardware agnostic design
- Intelligent runtime decisioning
RAPID DEVELOPMENT
New Physics Based Simulation Engine
Dive into a new era of simulation with our upgraded engine, featuring high-fidelity physics and improved rendering. Now, simulate RGBD cameras, 2D and 3D LiDAR, and force-torque sensors along with vacuum or magnetic grippers as well as forming rigid attachments like welding or nailing with ease. Experience our latest arm_on_rail_sim configuration to see the new engine in action—no dedicated GPU required!
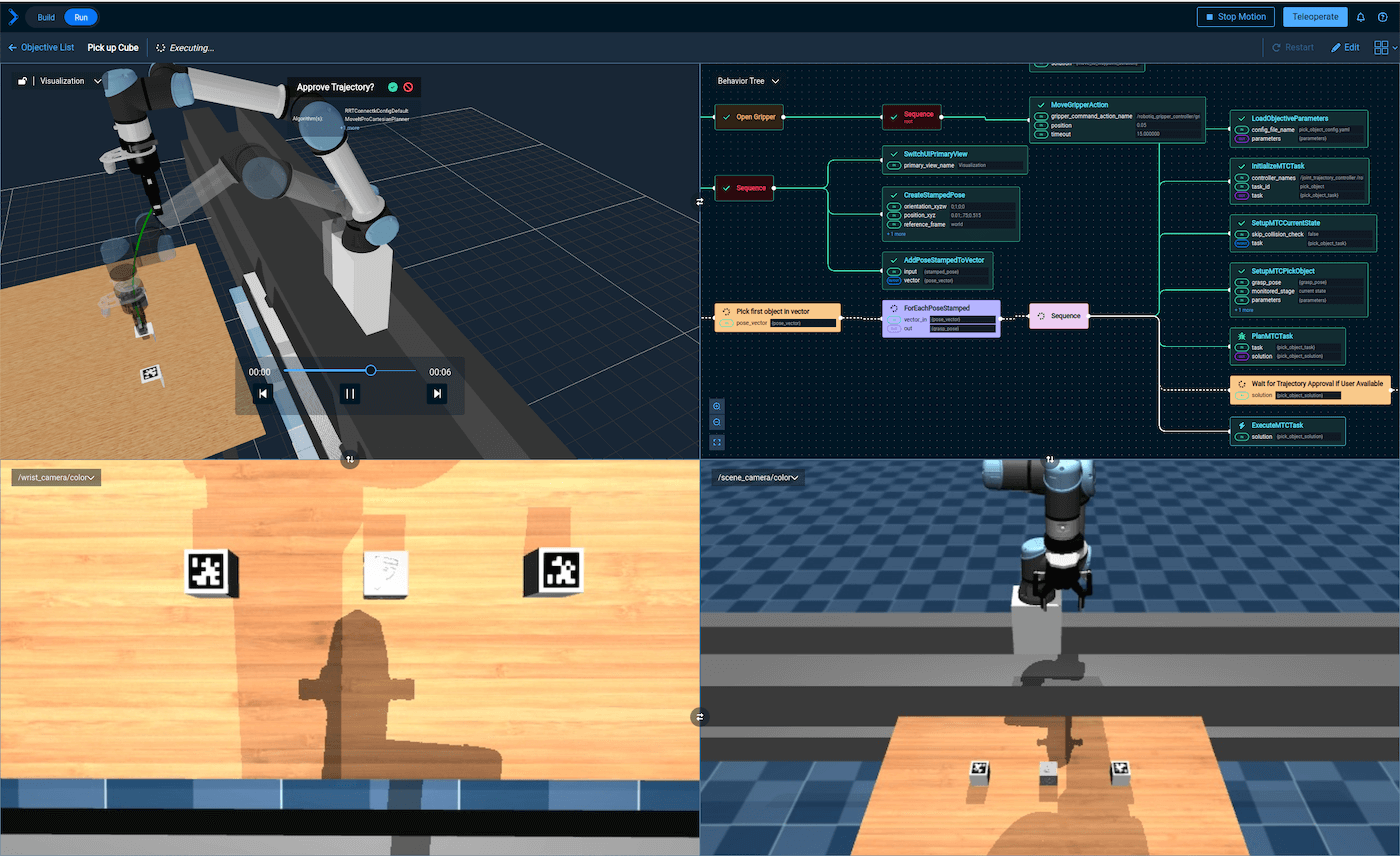
UI Improvements
The MoveIt Pro User Interface (UI) is continuously improving, and users of the latest release will enjoy a more intuitive 3D grid visualization, streamlined objective lists, and more intelligent error messaging. Developing, identifying points of failure, and correcting them has never been easier.
Getting Started Guides & Documentation
Added new articles addressing common configuration and setup needs. These improvements aim to reduce user friction and make onboarding smoother. Plus, we’ve updated our dependencies to include the latest versions of Ubuntu and ROS.
HARDWARE AGNOSTIC DESIGN
New Motion Planning with MoveIt Pro RRTConnect
Meet our new joint-space planner, Pro RRTConnect. This planner is deterministic, faster to compute, and generates more efficient paths compared to the old OMPL planners. Its first release supports both free space and Cartesian path planning, and like all MoveIt planners, is hardware agnostic and collision aware. The next release will support orientation constraints as well.
Improved Robot Configuration Setup Help
Our parser overhaul simplifies robot configuration from YAML and Xacro files, with improved error messaging and notifications for deprecated parameters. This means smoother hardware setup and fewer headaches.
INTELLIGENT RUNTIME DECISIONING
Force Compliant Controllers
We have added two real-time controllers for force sensitive tasks: a Joint Trajectory Admittance Controller (JTAC) and a Velocity Force Controller (VFC). The JTAC is great for use cases where object localization is not 100% perfect or when interacting with heavy objects, such as grasping motions and opening doors. The VFC is great for use cases where a particular force needs to be exerted over a trajectory, such as sanding and cutting motions.
PLC-Killer IO Controller
We have added an IOController that enables triggering binary IO ROS devices, such as activating vacuum grippers or communicating with PLCs, via behaviors.
Whole Body Control for Mobile Manipulators
Mobile manipulators present a great opportunity to both free manipulators from fixed bases and to improve their reachability. If you have a robot arm on a base which has too many constraints, too few degrees of freedom (DOF), or not enough reachability to perform a task, whole body planning will enable the base to move in coordination with the arm to resolve redundancy and increase reachability. In its initial release, whole body planning only supports differential drive bases. Support for omnidirectional bases will be added in a future release.
Navigation Support
Control your AMR or mobile base with two new Behaviors: NavigateToPoseAction and NavigateThroughPosesAction. These send the robot base to one or more poses using ROS’s Nav2 package.
New and Improved Behaviors
We’ve added and enhanced several behaviors:
- PlanToJointGoal: Seamlessly plan between joint states.
- CropPointsInSphere: Refine point cloud data with ease.
- SetupMTCIgnoreCollisionsBetweenObjects: Adjust collision settings at runtime using program logic.
- VisualizeMesh, VisualizePath, VisualizePose: Visualize custom meshes, paths, and poses within the Web UI.
Release 6 marks a significant step forward for MoveIt Pro, reinforcing its position as the leading platform for robotic manipulation. Whether you’re developing a new application or fine tuning your prototype for better performance and reliability, these new features and improvements will help you achieve more with less effort.

